2026-06-26
近日,中国科学技术大学工程科学学院、人形机器人研究院冯伟特任教授团队,成功研发兼具电热可控粘附、机器学习智能感知一体化的相变共晶凝胶具身智能机器人系统,攻克软体抓取、爬壁机器人领域 “强粘附与可脱附难以兼顾、界面状态无法实时感知” 长期行业痛点,相关成果以“Switchable adhesion of phase-transition eutectogels with integrated machine learning-enhanced intelligent adhesion sensing”为题,发表在国际学术期刊《自然·通讯》(Nature Communications)。
研究核心创新点
相变低共熔凝胶:利用低共熔溶剂构建凝胶网络,通过温度诱导的相转变,实现凝胶在结晶态(高模量、强粘附)与无定形态(低模量、易脱附)之间的可逆切换。
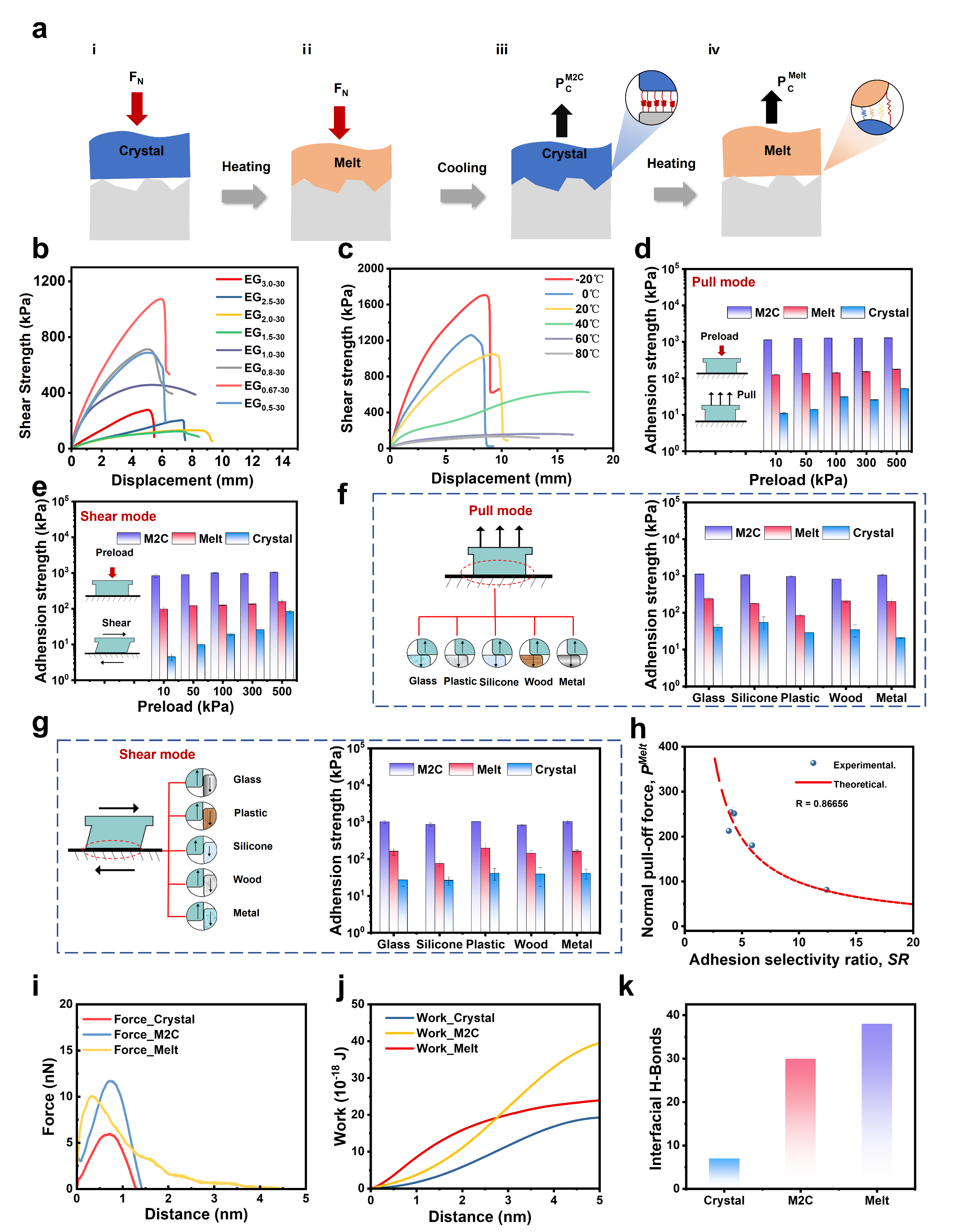
图1-共晶凝胶的材料特性
机器学习增强传感:集成机器学习算法处理凝胶的电信号,实现智能粘附感知。系统能实时解耦粘附力信号,精准判断接触状态(附着/脱离),无需额外传感器。
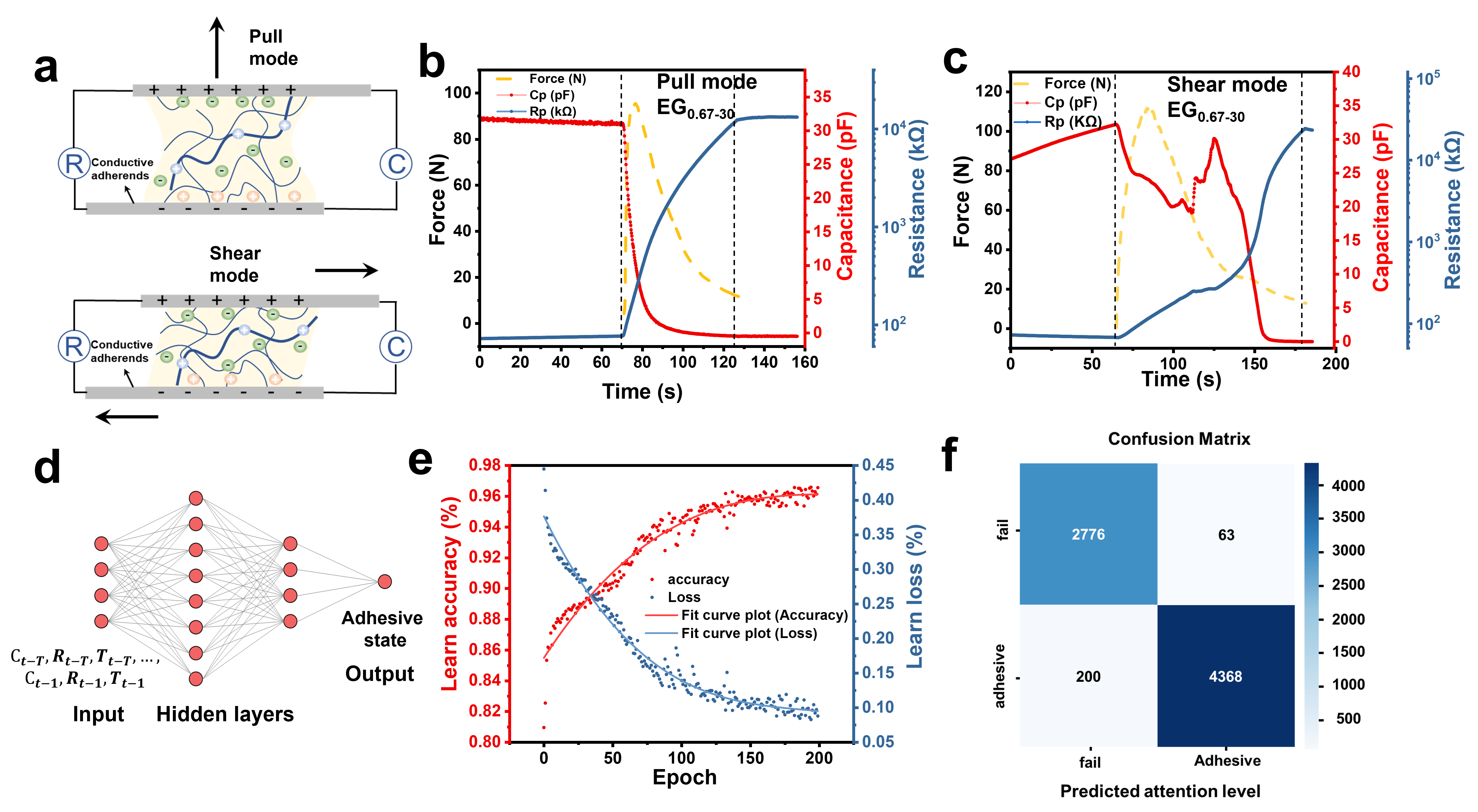
图2-粘附状态的智能感知
高性能指标:在粗糙或多孔表面上实现了高达1700 kPa的粘附强度,且具备优异的环境稳定性(低挥发、耐脱水)。
图3-三足爬墙机器人的设计制作及运动控制和感知
要厘清 “熔融 - 结晶相变如何改变界面接触形态、微观纹理与粘附力的定量关联”,必须实现纳米级三维形貌无损表征。微观界面形貌数据是论文分子动力学仿真、粘附力学模型建立的核心实验依据,在该项前沿材料与机器人交叉研究中,中图仪器 SuperView W1 白光干涉仪作为核心微观形貌表征设备,发挥了关键数据支撑作用。

团队需要对比20℃结晶态、70℃熔融态凝胶粗糙度。SuperView W1 白光干涉仪具备0.1nm Z 轴分辨率、0.005nm RMS 粗糙度重复性,非接触式测量不会划伤柔软凝胶表层,精准获取冷热循环前后凝胶形貌变化,直观解释低温结晶硬化、高温软化贴合的形貌机理,为相变粘附理论提供直接微观证据。
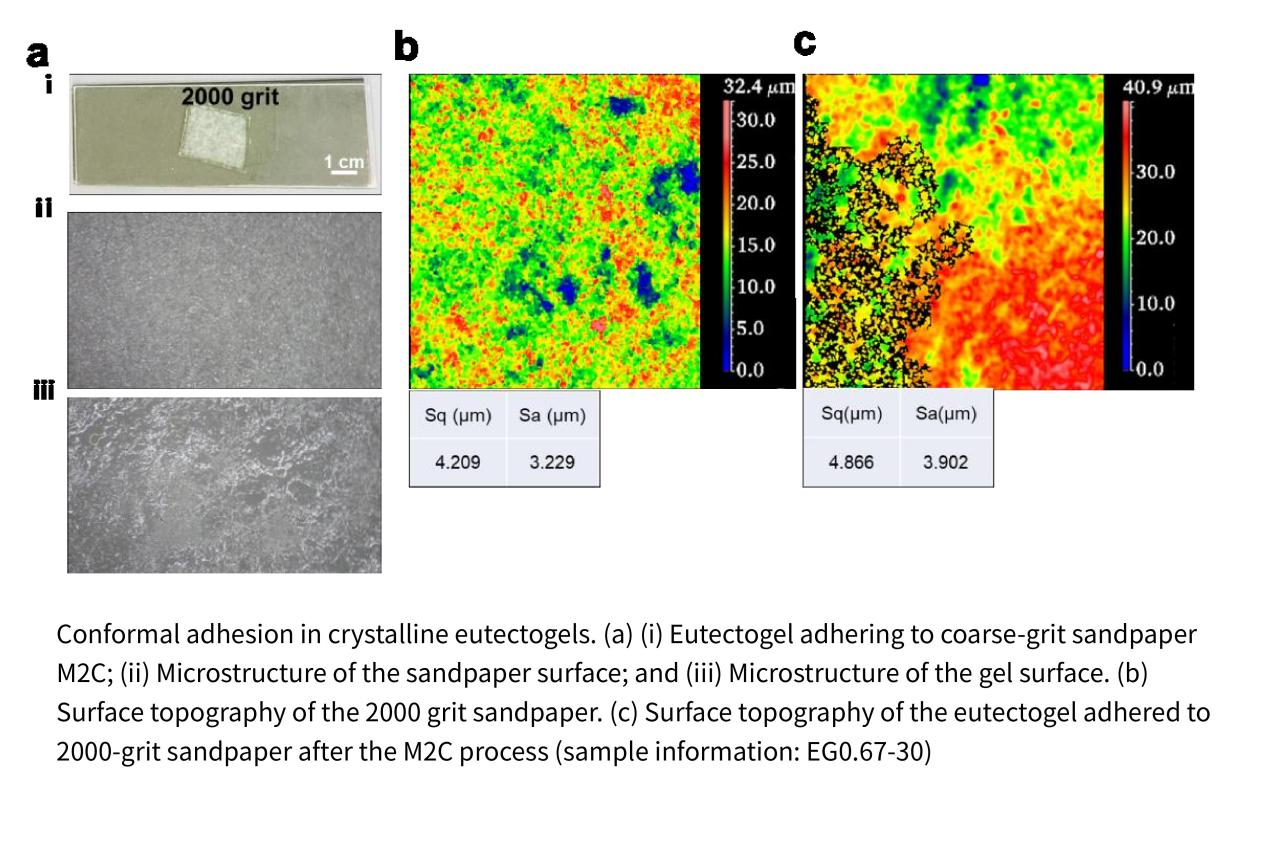
图4-白光干涉仪测试凝胶粗糙度数据
SuperView W1系列对标国际一线产品测量精度,同时提供本土快速技术支持、免费软件迭代、科研定制化测量方案,近年持续走进中科大、清华、浙大、哈工大等顶尖科研院所,在软物质、MEMS、半导体、光学、仿生机器人交叉学科广泛落地。 本次登上《Nature Communications》顶级期刊,是国产白光干涉仪在软体机器人、相变智能材料前沿领域标志性应用成果,证明中图仪器纳米级形貌测量能力完全达到国际顶刊实验数据标准,实现高端科研仪器国产替代关键一步。另外有智能表界面、机器人和人工智能方面的需求可以联系中国科学技术大学工程科学学院冯伟教授团队。